
Internship at AI Labs.tw
Artificial Intelligence Intern
May 2018 ~ July 2018
About Taiwan AI Labs:

Taiwan AI Labs (AILabs.tw) is a privately funded research organization based in Taipei, and led by Ethan Tu,
a former principal development manager at Microsoft. He is also well-known as the founder of PTT, one of the most
influential online forums in Taiwan. At AILabs.tw, our focused areas are healthcare, smart city, and human interaction, assigned to respective teams of engineers
from diverse professional backgrounds.
My role at Taiwan AI Labs:
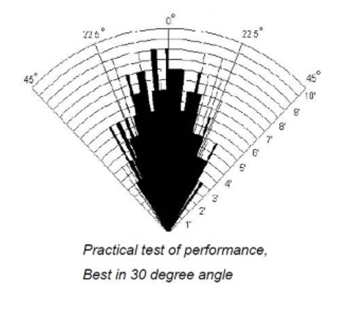
Devised control of a nano quadcopter (Crazyflie) using ultrasonic sensor feedback to achieve obstacle avoidance
My role at Taiwan AI Labs:
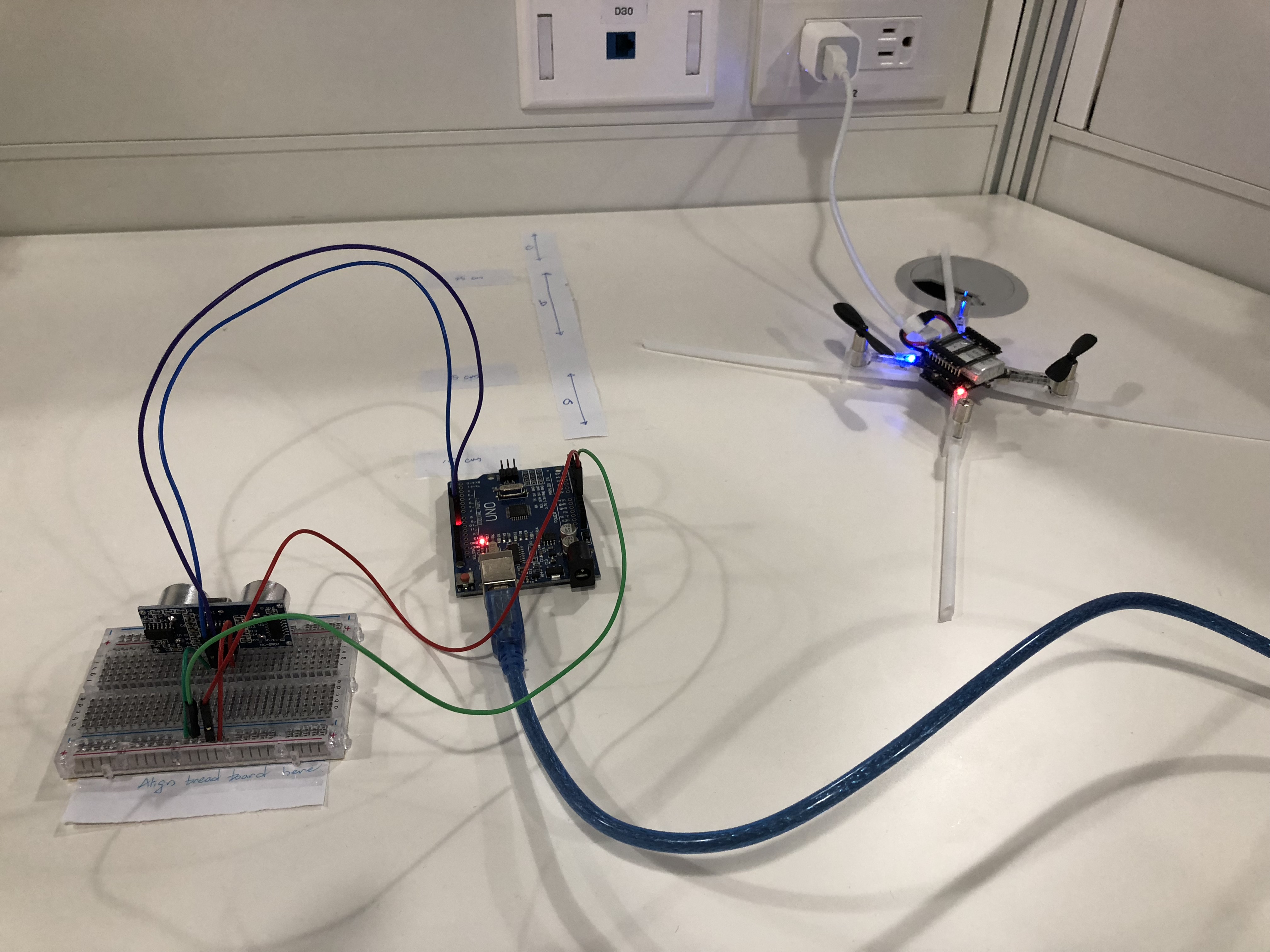

| Sensor Type | Ultrasound |
|---|---|
| Range | 2-400cm |
| Accuracy | Up to 3mm |
| Repetition Rate | 40 Hz |
| Wave | 40 kHz |
| Interface | digital |
| Operating Power | 5V DC |
| Weight | 10 g |
| Price | $3.95 |
 Algorithm at a high level(Python)
Algorithm at a high level(Python)
import serial
import threading
import time
import Crazyflie library
URL="Crazyflie address"
serial.Serial('COM_Port', Baud_Rate)
Class Threading_between_two_loops
def __init__:
Syncronize with Crazyflie
Take off
def infinite_loop_1:
While True:
Crazyflie motion commands
def infinite_loop_2:
While True:
Read and register sensor data
if__name__ == '__main__':
open Class
While True:
thread_infinite_loop_1.start()
thread_infinite_loop_2.start()
input("Take off")
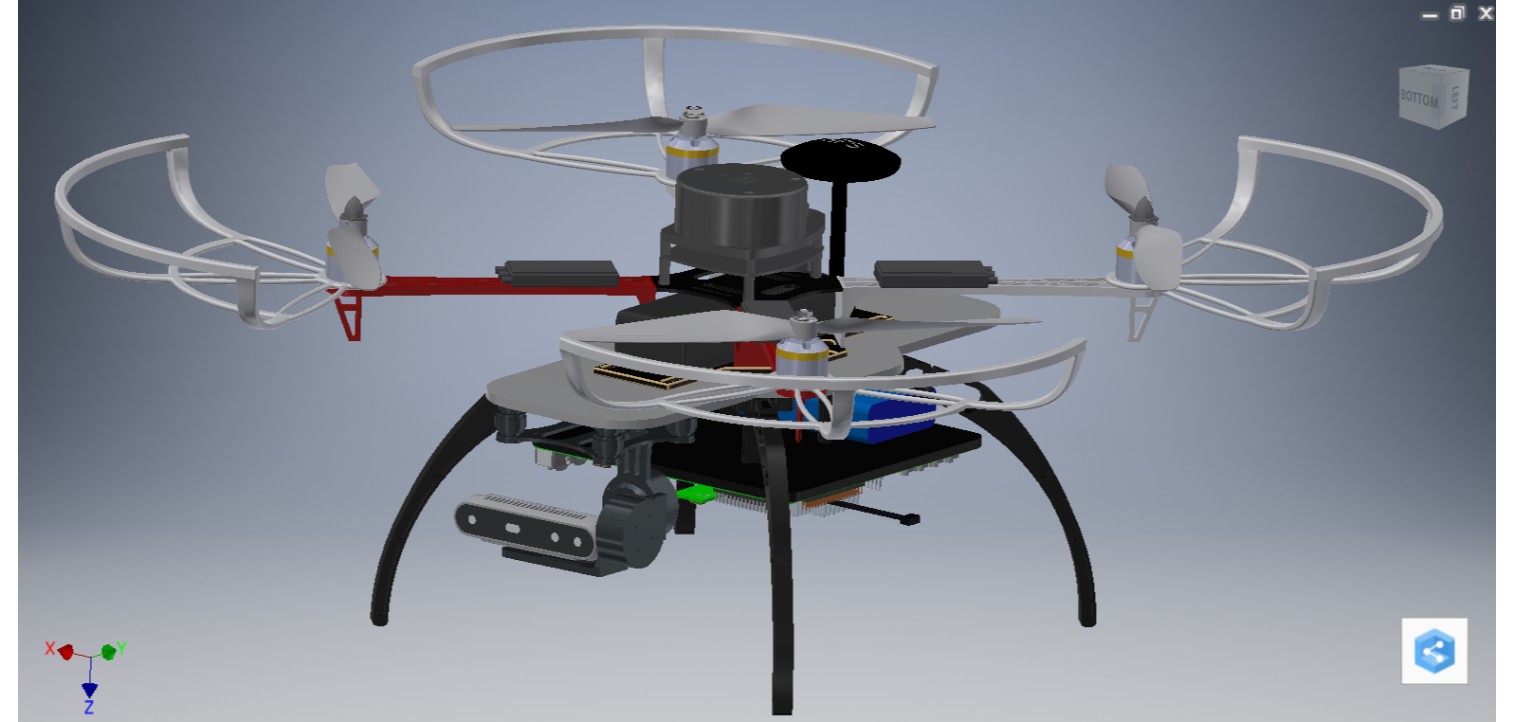
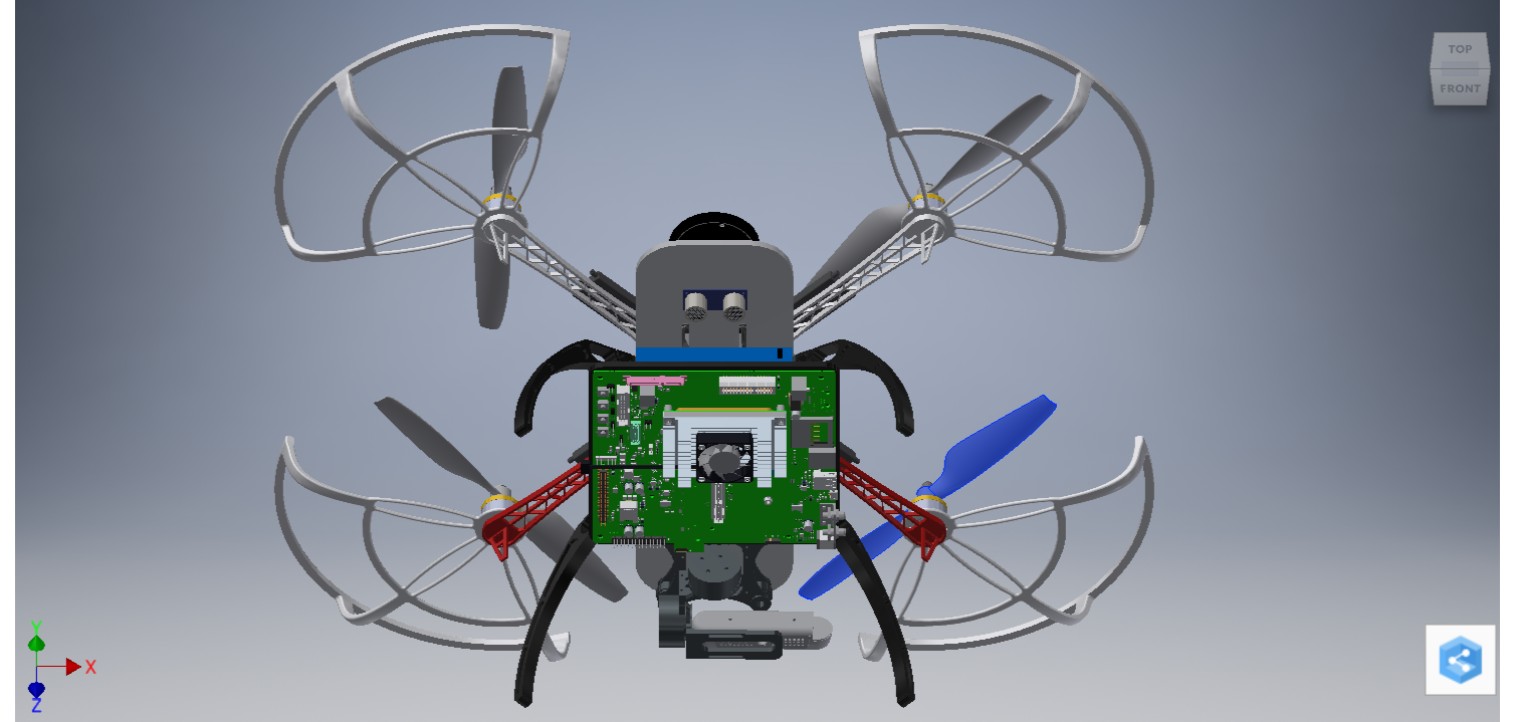
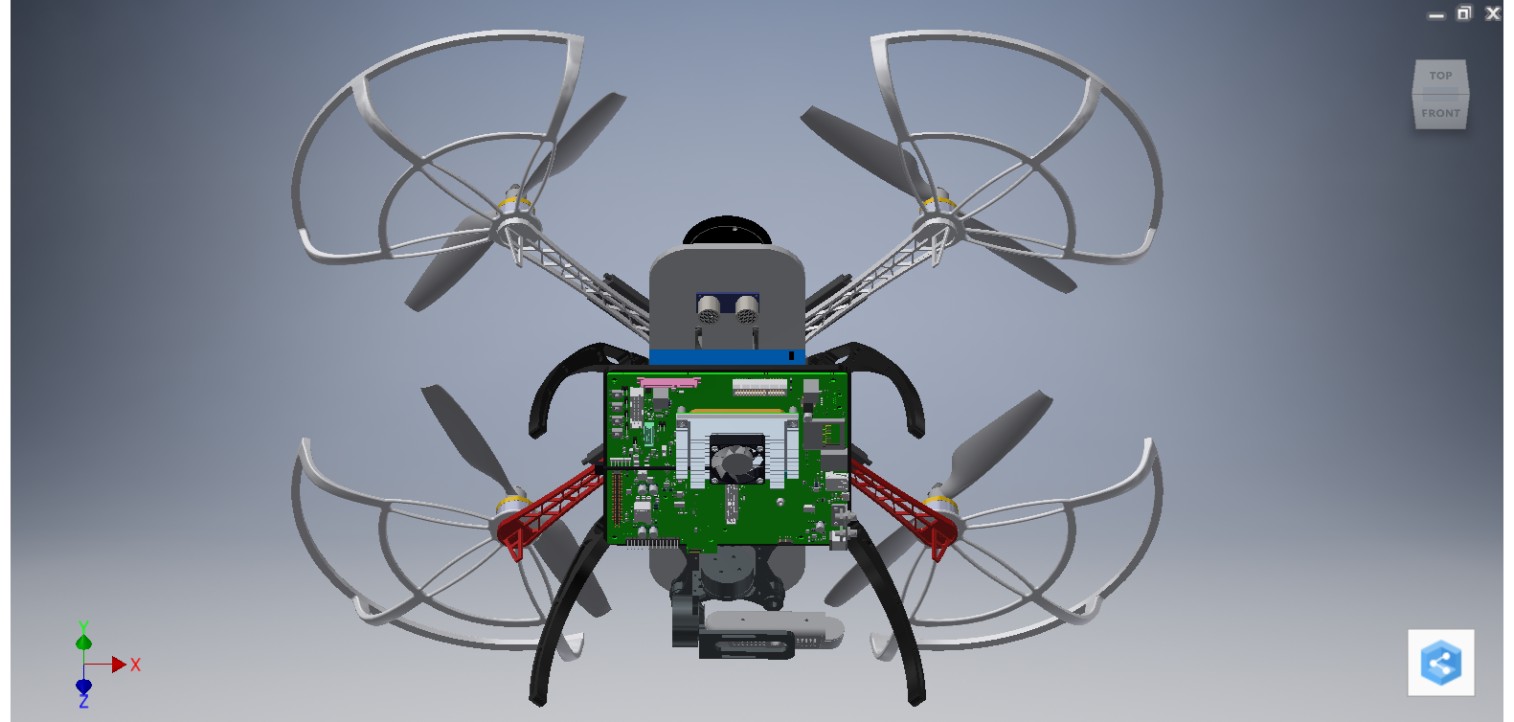
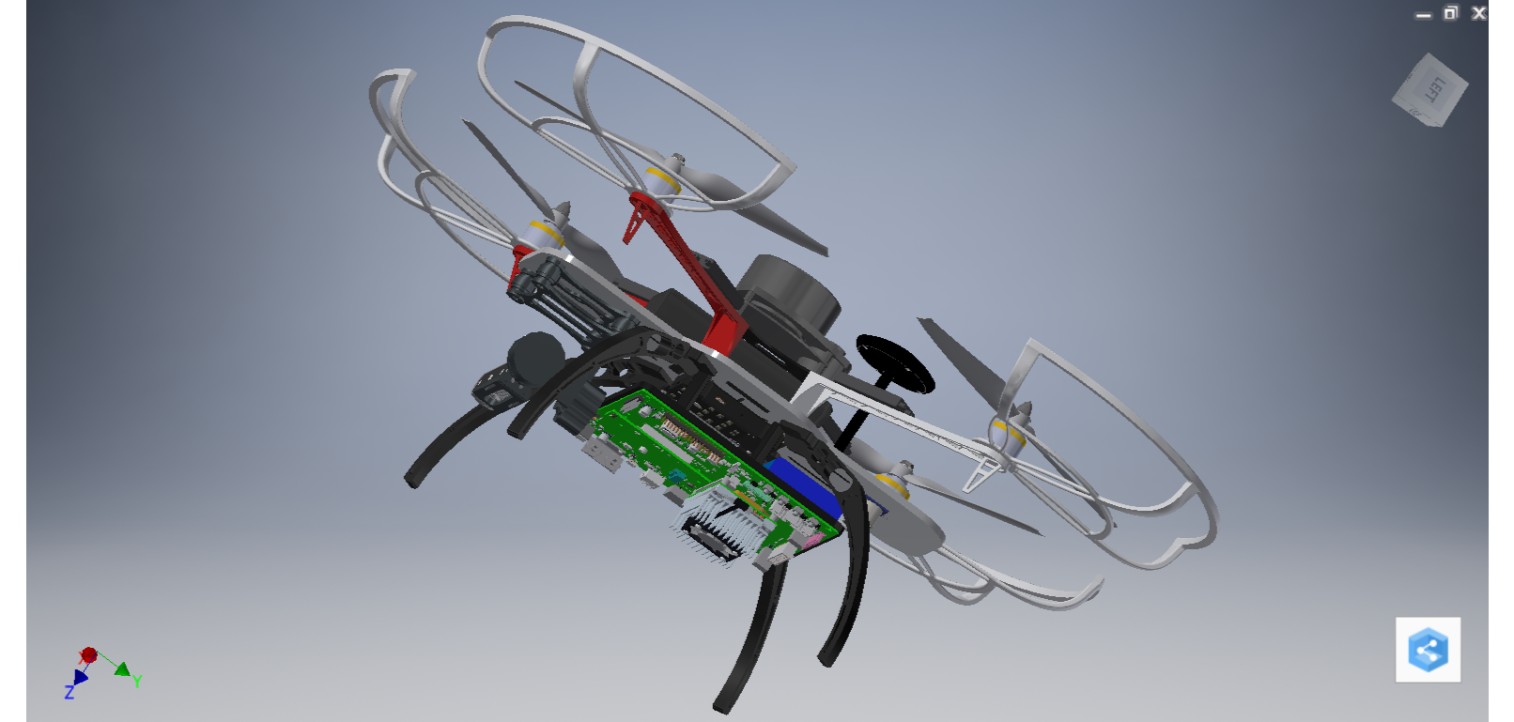
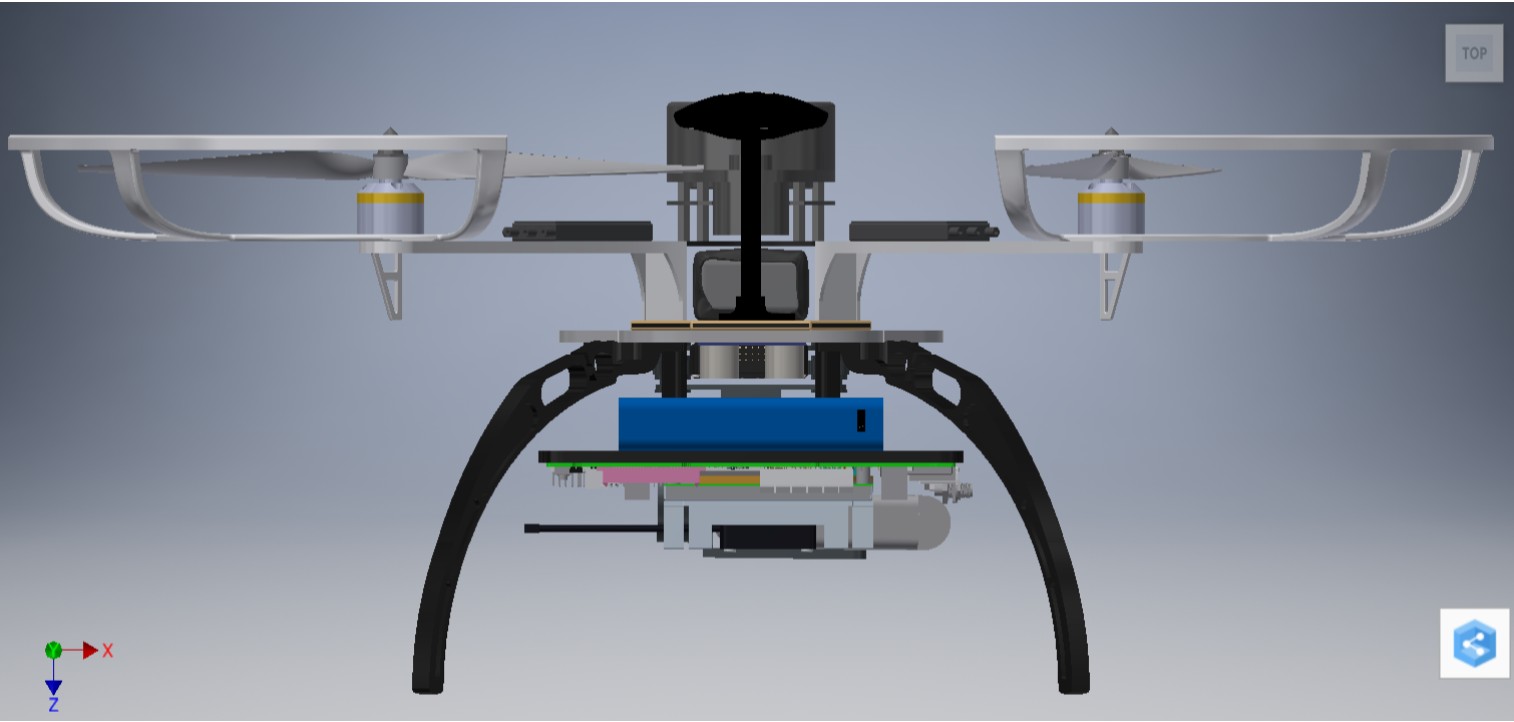
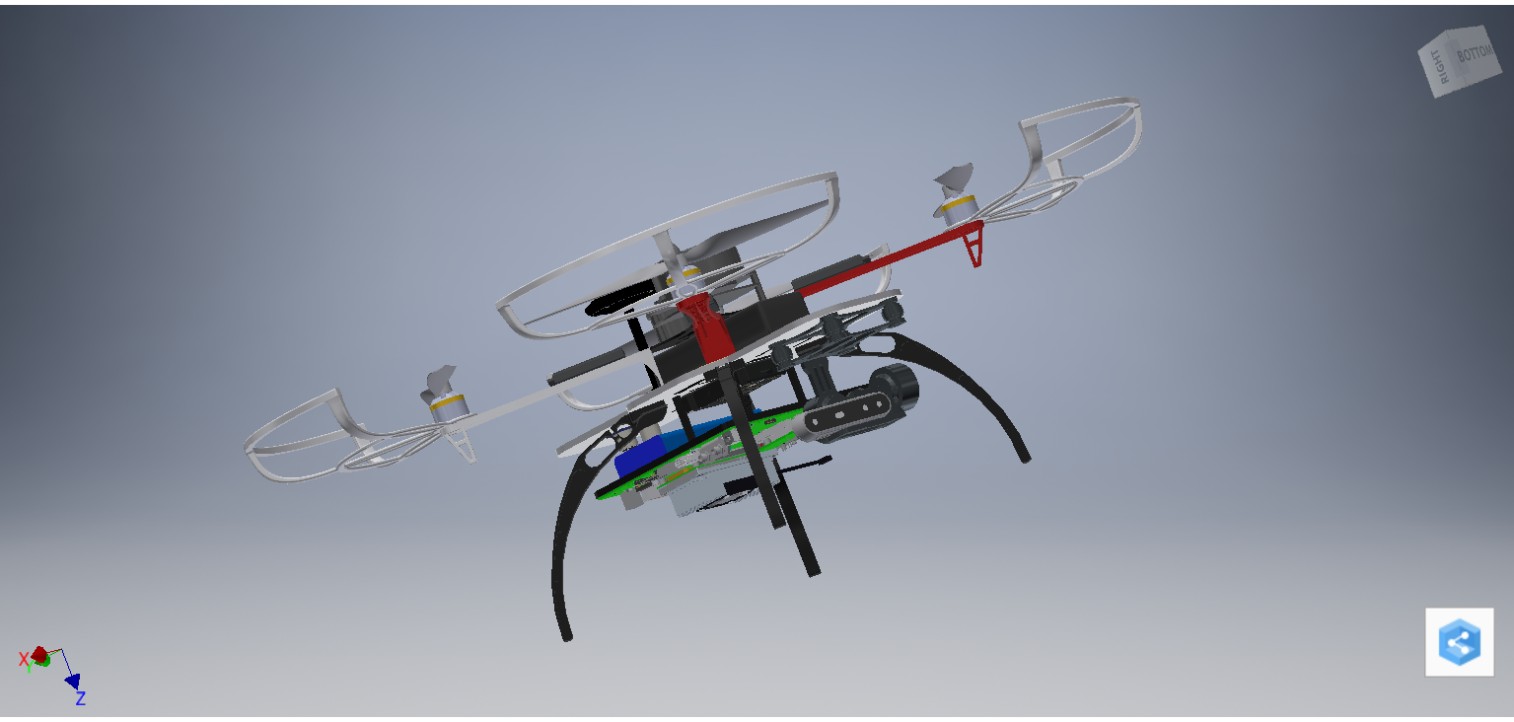
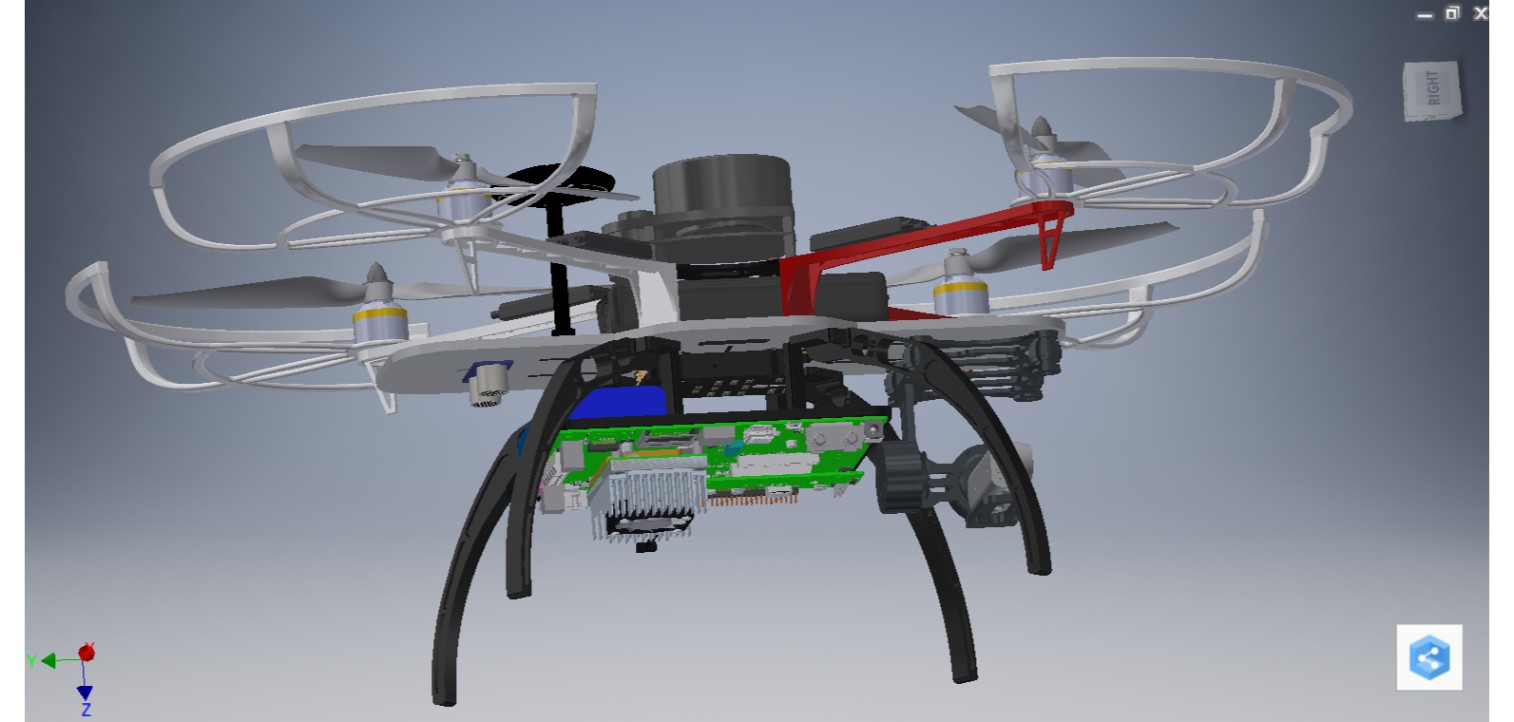
Built and tested DJI F450 GPS Drone used for running algorithms under development
The Quadcopter team

Established communication via MAVLink with Pixhawk Flight Controller to fly a quadcopter from a ground station.
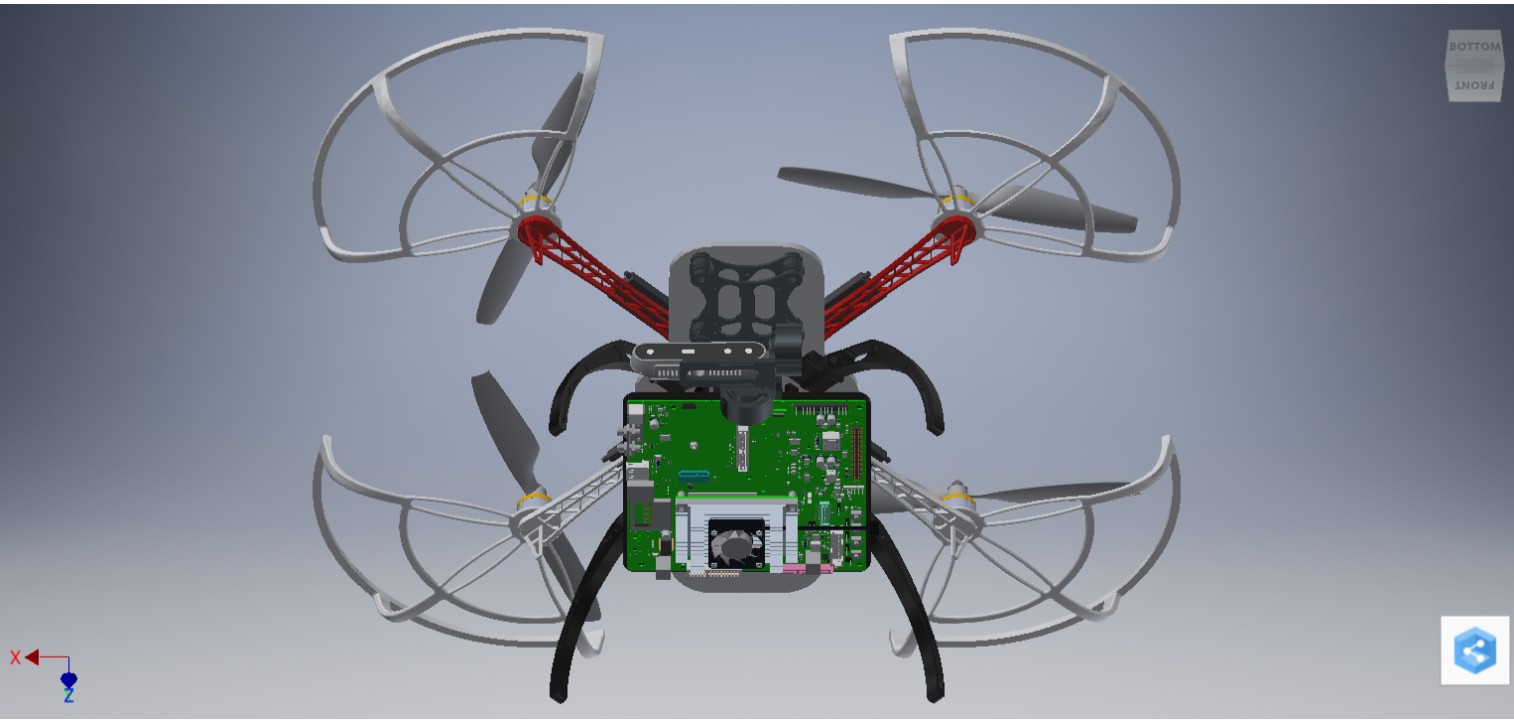
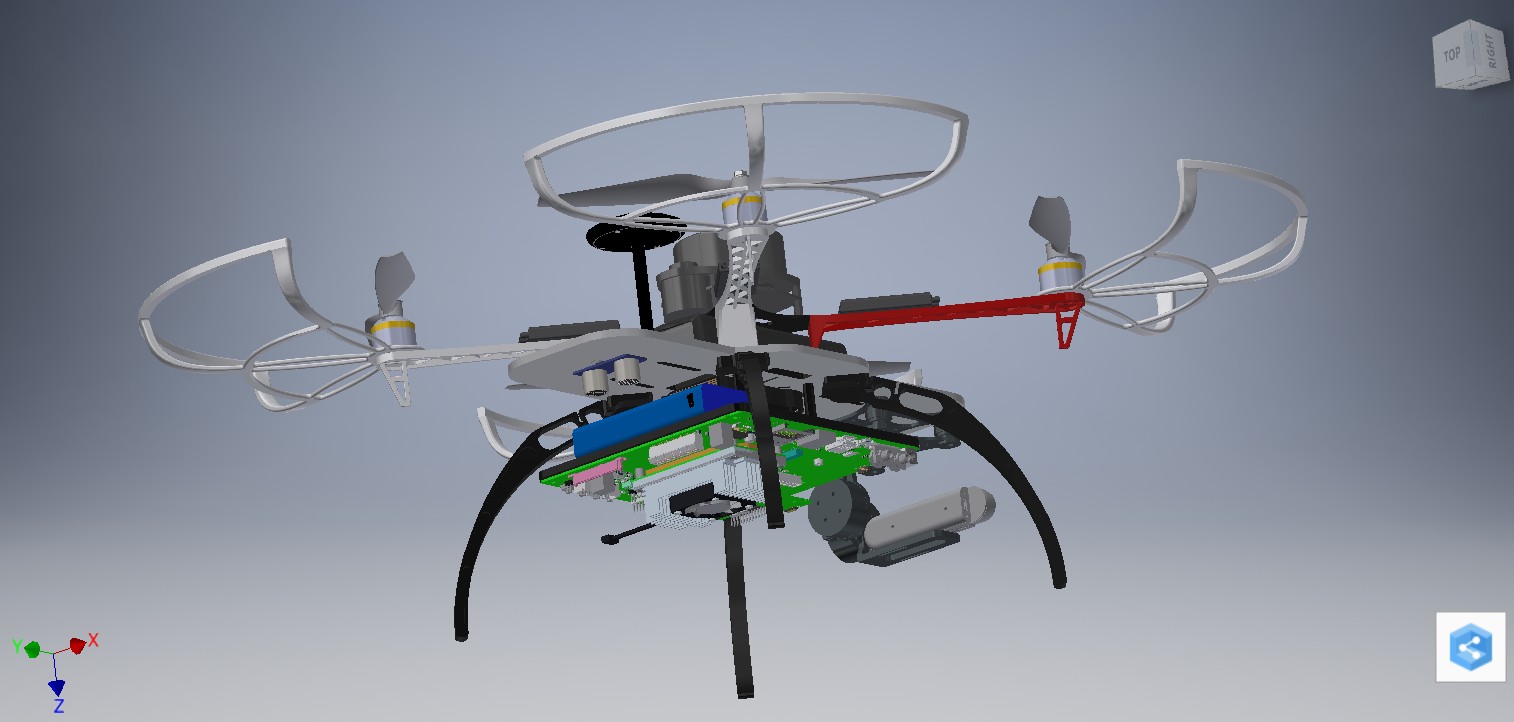
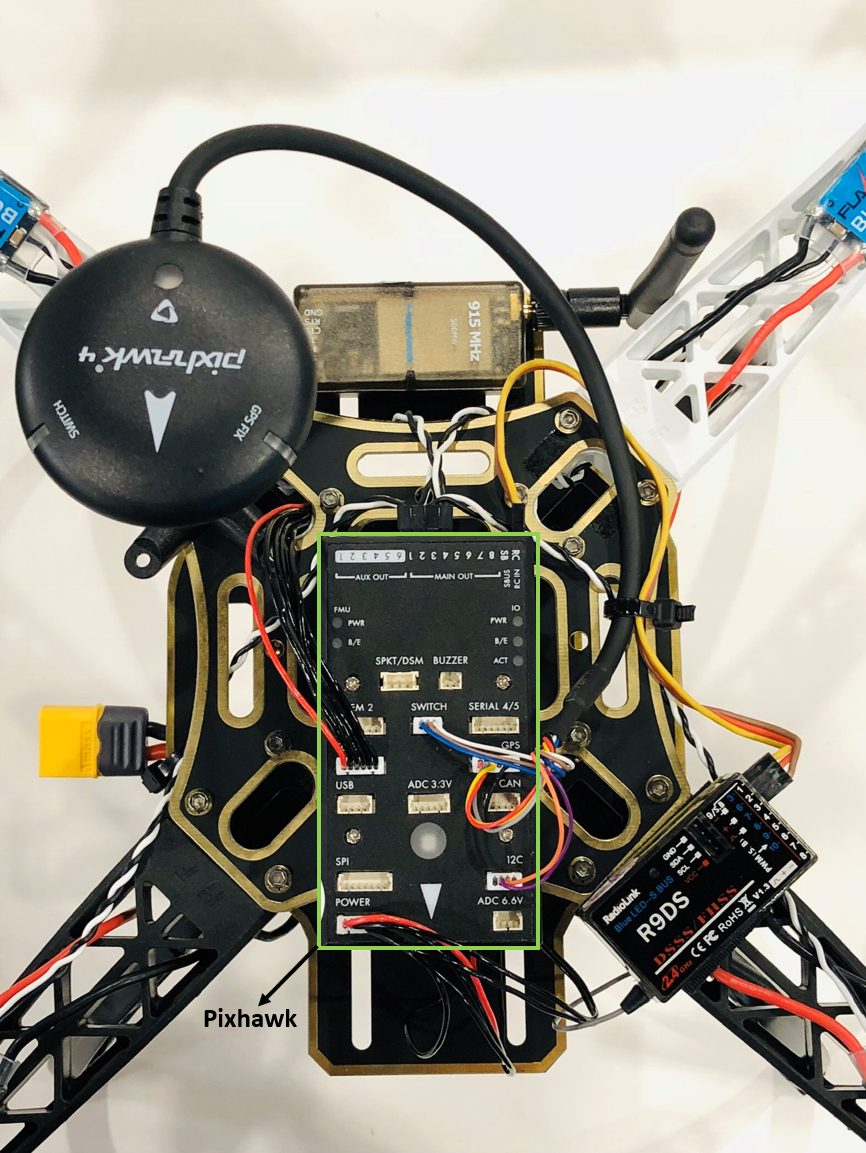 Because our goal was to implement a variety of sensors that would increase the drone's
degree of automation, we needed a communication protocol where inputs of external devices can be added and recognized by the drone. MAVLink
helped us with this job. It is a protocol for communicating with a off-the-shelf flight controller, Pixhawk, boxed in green as shown in
the picture on the left. Pixhawk can be connected either via USB, where data streams through a COM port, or wirelessly by an IP address.
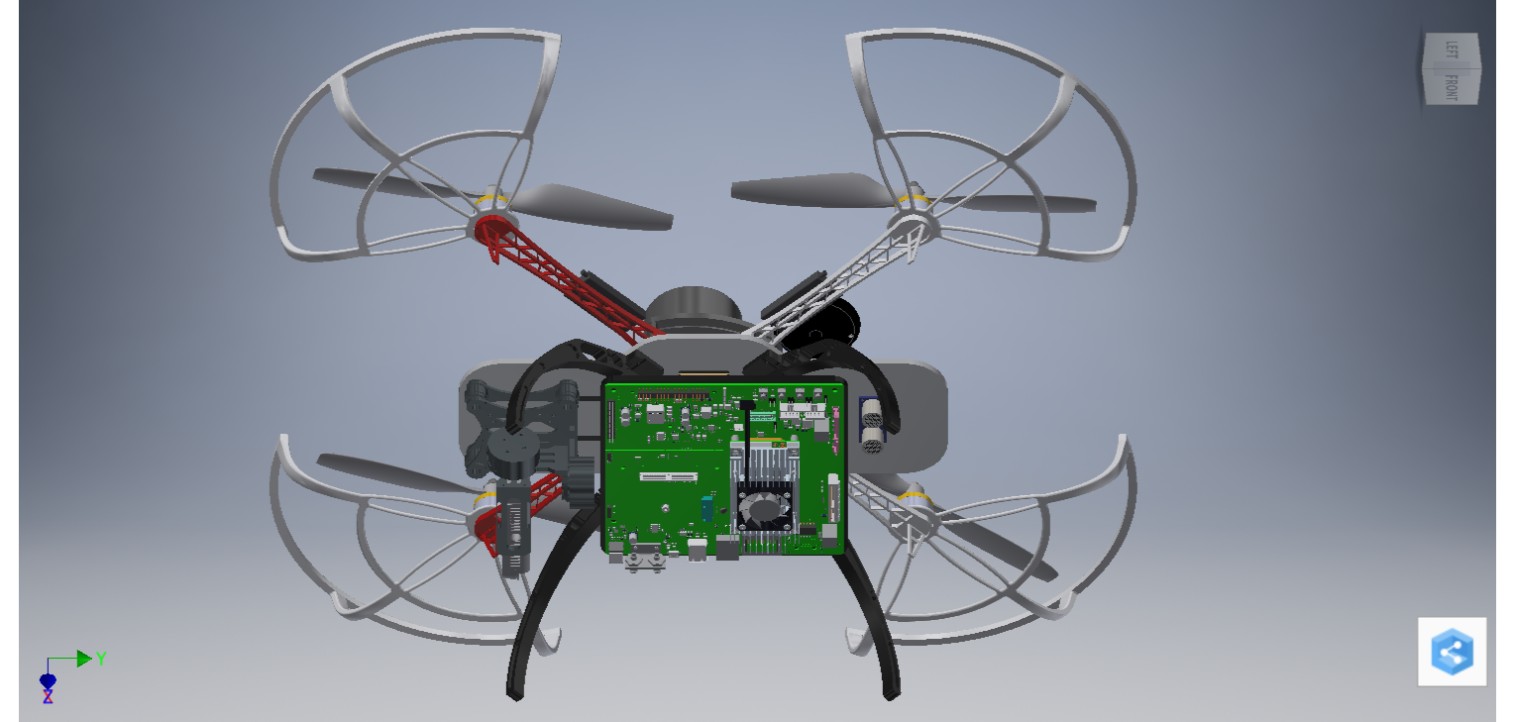
Because our goal was to implement a variety of sensors that would increase the drone's
degree of automation, we needed a communication protocol where inputs of external devices can be added and recognized by the drone. MAVLink
helped us with this job. It is a protocol for communicating with a off-the-shelf flight controller, Pixhawk, boxed in green as shown in
the picture on the left. Pixhawk can be connected either via USB, where data streams through a COM port, or wirelessly by an IP address.We began by writing a test script that commanded the drone to arm, disarm, sleep for a few seconds, then arm again. The purpose of this initial test was not only to test the the connection between user input and Pixhawk, but also to ensure that all four rotors would turn properly. We also tested the reading of other parameters through this protocol, including the drone's battery life, GPS, altitude, and so on.
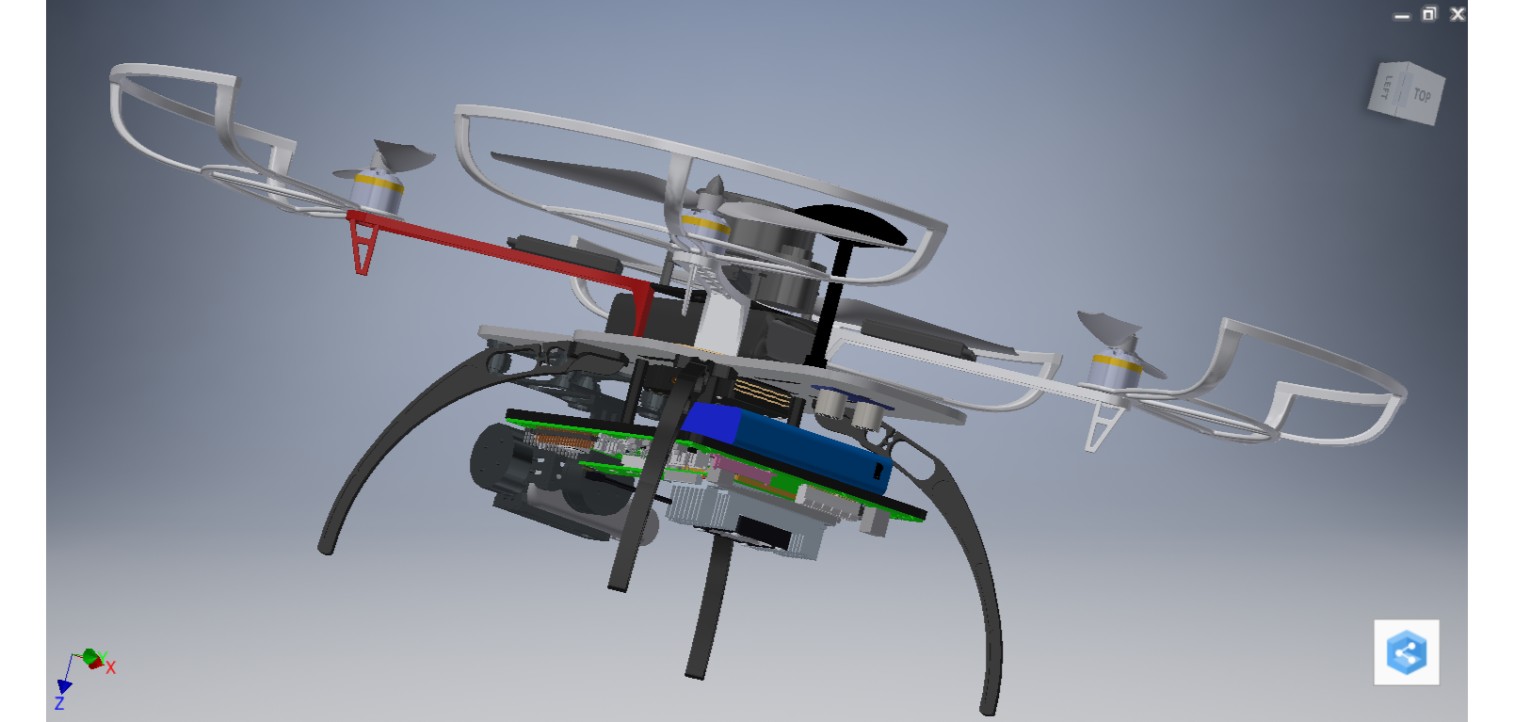
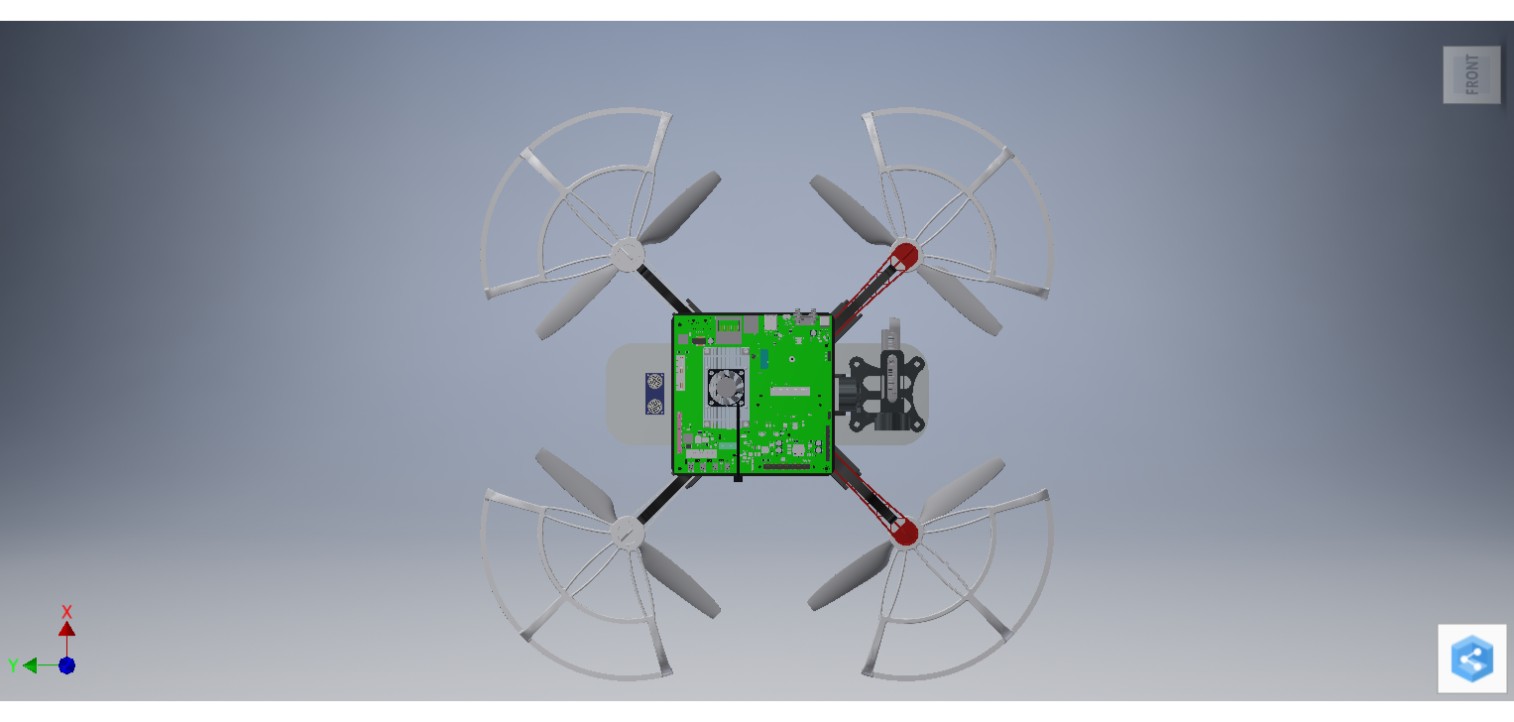
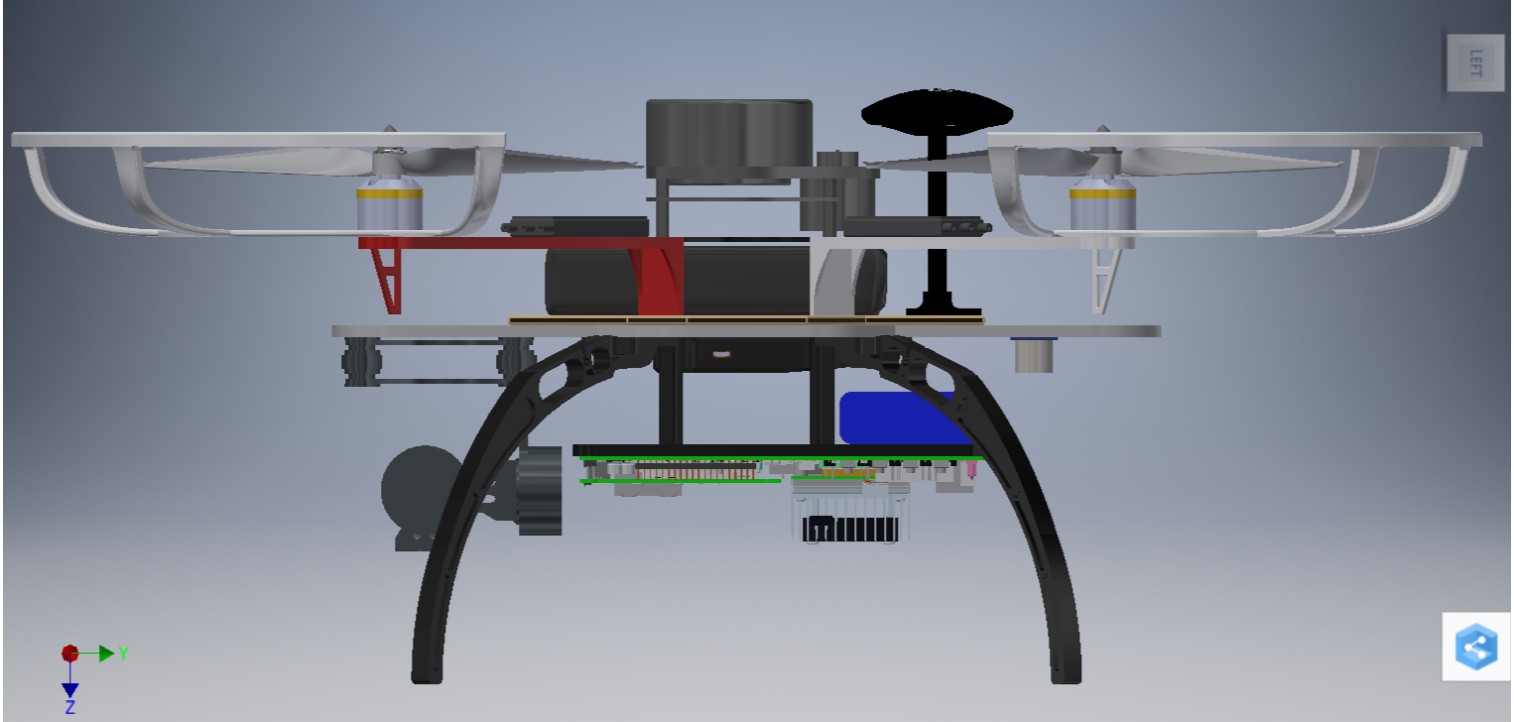
Customized quadcopter frame to accommodate installations of sensors, camera, and NVIDIA Jetson TX2 on board


Designed and developed a safe indoor lab to test-fly experimental drones.



